Хочу представить форуму проект монтировки, который я вынашивал давно, как только осознал несовершенство для фото eq3. Она с трудом несет ньютон 150/750, не позволяя раскрыть его возможности, о большем говорить не приходится.
Серьезно начал этот проект год назад, все обдумав лежа на диване в гостинице в командировке, и заказывая необходимое на Али. Использованы идеи, как описанные на этом форуме, так и подсмотренные в коммерческих продуктах, что-то придумано не имея перед глазами аналогов, например тормоз, фрикцион, промежуточный рычаг. Вероятно меня поправят в моих рассуждениях, но считаю что проект дошел до стадии "что-то получилось". Также храню эти материалы в Дзене под заголовком "Двухосный тяжелый астротрекер".
Большинство коммерчески доступных ориентированных на любителя монтировок и DIY проектов используют в качестве привода червячную пару (ЧП) и шаговый двигатель(ШД).
Червячная передача всем хороша, однако для достижения высокой плавности и точности ведения требуются: высокая точность изготовления червячного колеса и червяка, корпуса и валов, на которых они вращаются, и точная взаимная выставка.
Требования можно снизить, увеличивая диаметр червячного колеса - в этом случае очевидно, что влияние линейных погрешностей в зубчатом зацеплении на угловые погрешности пропорционально снижается. Л.Л. Сикорук в своей книге рекомендует диаметр червячного колеса не менее аппертуры телескопа. Даже при таком диаметре колеса требования к точности высоки. Сейчас относительно недорогие монтировки, типа EQ6, обходятся ещё меньшим диаметром. И, так как в каких-либо массовых изделиях подобные механизмы не нужны, высокоточные ЧП большого диаметра и корпус на помойке не найдешь. А изготовление требует специального станочного оборудования - получается дорого и выходит за рамки хобби.
Из альтернативных механизмов хорошо известен механизм Гамона.
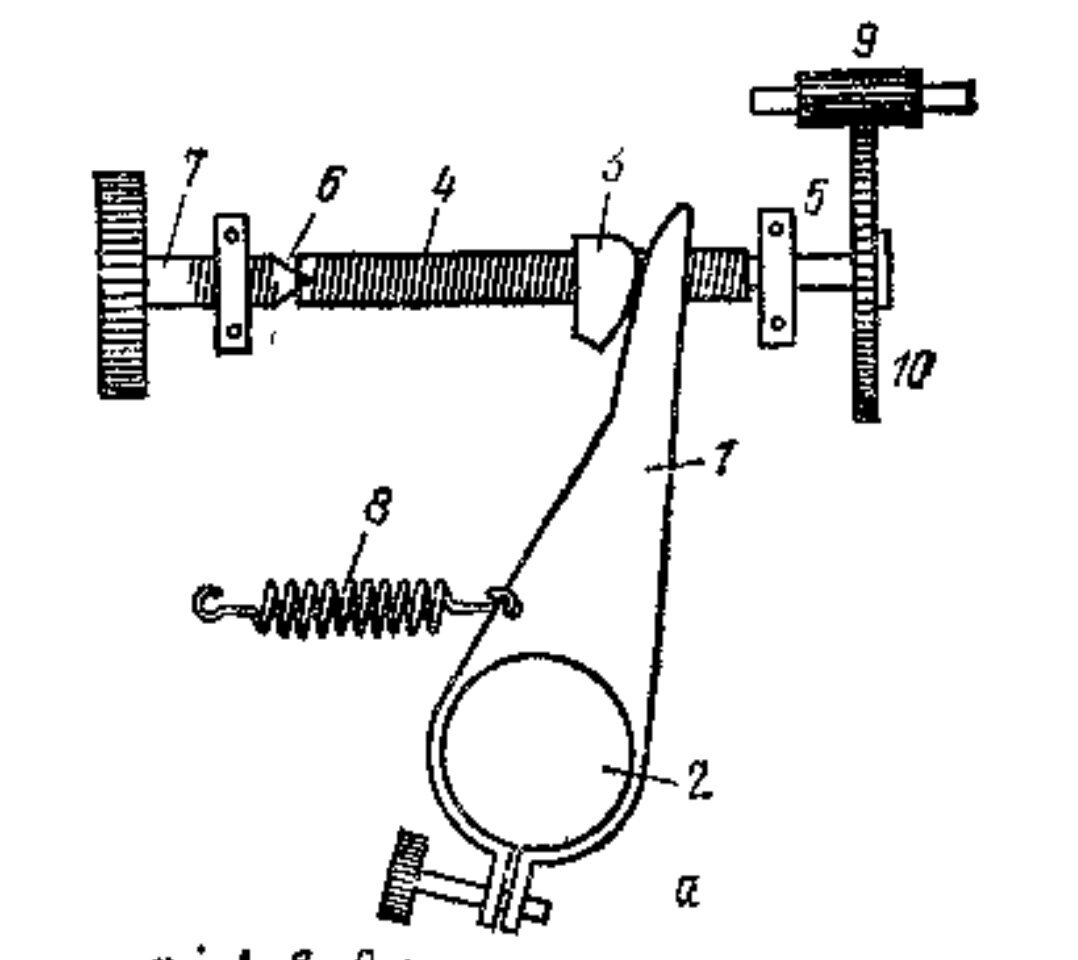
Он представляет собой достаточно длинный рычаг (1) на оси монтировки (2), конец которого приводится в движение винтом (4) через кулачок (3).
Преимущества его над ЧП, на мой взгляд:
- простота изготовления;
- расстояние между винтовой парой и осью (плечо) кратно больше радиуса ЧП сравнимых габаритов.
Недостатки тоже есть:
- нелинейная зависимость угла поворота от движения винтовой пары (которая компенсируется формой кулачка, но требует качества сопрягаемых поверхностей)
- ограниченный ход рычага - необходимо вручную переводить его.
В своей разработке я попытаюсь реализовать достоинства, преодолев эти 2 недостатка.
- Современный способ преодоления нелинейности очевиден - программный. Что позволит отказаться от кулачка и использовать в сочленениях шарикоподшипники.
- Ограниченный ход рычага преодолевается за счет управляемого контроллером тормоза оси и фрикциона между осью и рычагом, позволяющего перевести рычаг в начало хода.
При конструировании я придерживался следующих принципов:
1. Достижение максимально возможной плавности ведения и гидирования, чтобы качество снимков упиралось в качество атмосферы, т.е. около 1 угловой секунды.
2. Достижение достаточной жесткости конструкции для трубы телескопа, которая может быть поднята одним человеком (20-40 кг). Чтобы при прикосновении к окуляру или фокусеру не было тряски изображения.
3. Использование максимально серийных и доступных компонентов. Без уникальных деталей, найденных на помойке в НИИ. Оси - автомобильные ступицы ( прочность сомнений не вызывает, доступно, готовый узел вращения с двухрядным подшипником с предварительным натягом, готовые фланцы, жесткость, ).

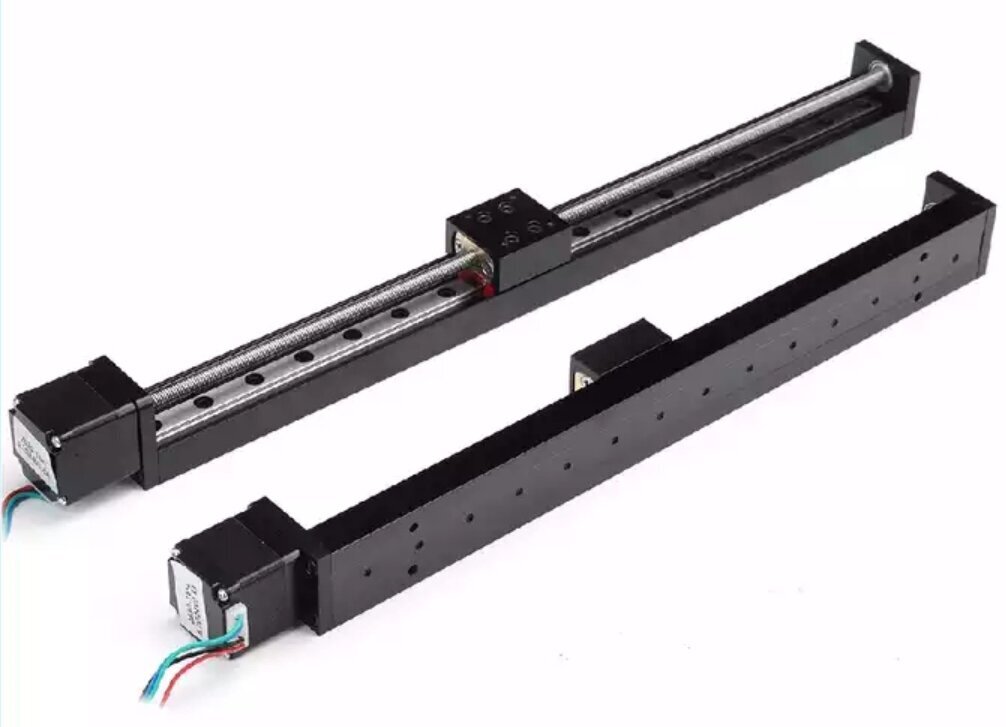
Винтовая пара - китайский линейный привод для ЧПУ станка в сборе с ШД.
Контроллер, и другая электроника - arduino и китайские компоненты ЧПУ. Тормоз - дверной магнитный замок.
4. Возможность относительно бюджетного и точного повторения конструкции. Для этого используются такие технологии как: лазерная резка листовой стали (до 10мм), ручная сварка, нарезание резьб, 3D печать пластиком. Исключены токарные и фрезерные операции.
5. Программное обеспечение совместимо с монтировками SkyWatcher и ориентировано на работу с eqmod, чтобы работать с любыми программами-планетариями и не писать своих драйверов, а то можно погрязнуть в программировании.
Несмотря на то, что, чем больше длина рычага, тем плавнее поворот, длина рычага, выбрана не более 300 мм из следующих соображений:
- Габариты и вес. Я хочу иметь возможность перевозить монтировку на авто и донести её до авто;
- Сектор непрерывного ведения при ходе привода 200 мм и рычаге 300мм получается почти 40 градусов, это 2,5 часа непрерывного слежения с суточной скоростью. Меньший сектор будет неудобен из-за частого перевода рычага с вероятным срывом гидирования.
- Скорость наведения на объект и перевода рычага при рычаге 300мм, шаге резьбы 1мм, микрошаге 16 и реалистичной для ардуино частоте управления 10кГц получается 0,6 градуса/сек. Нормально, но медленней не хочется.
- Периодическая ошибка. Здесь, очевидно, будет заметен период вращения винта. Чтобы гид мог компенсировать эту ошибку при любой разумной экспозиции гид-камеры, период вращения винта при суточной скорости слежения не должен быть очень мал. Из моего опыта настройки гидирования, 1 минута времени - допустимое значение. При указанных выше параметрах получается 48 секунд - на грани.
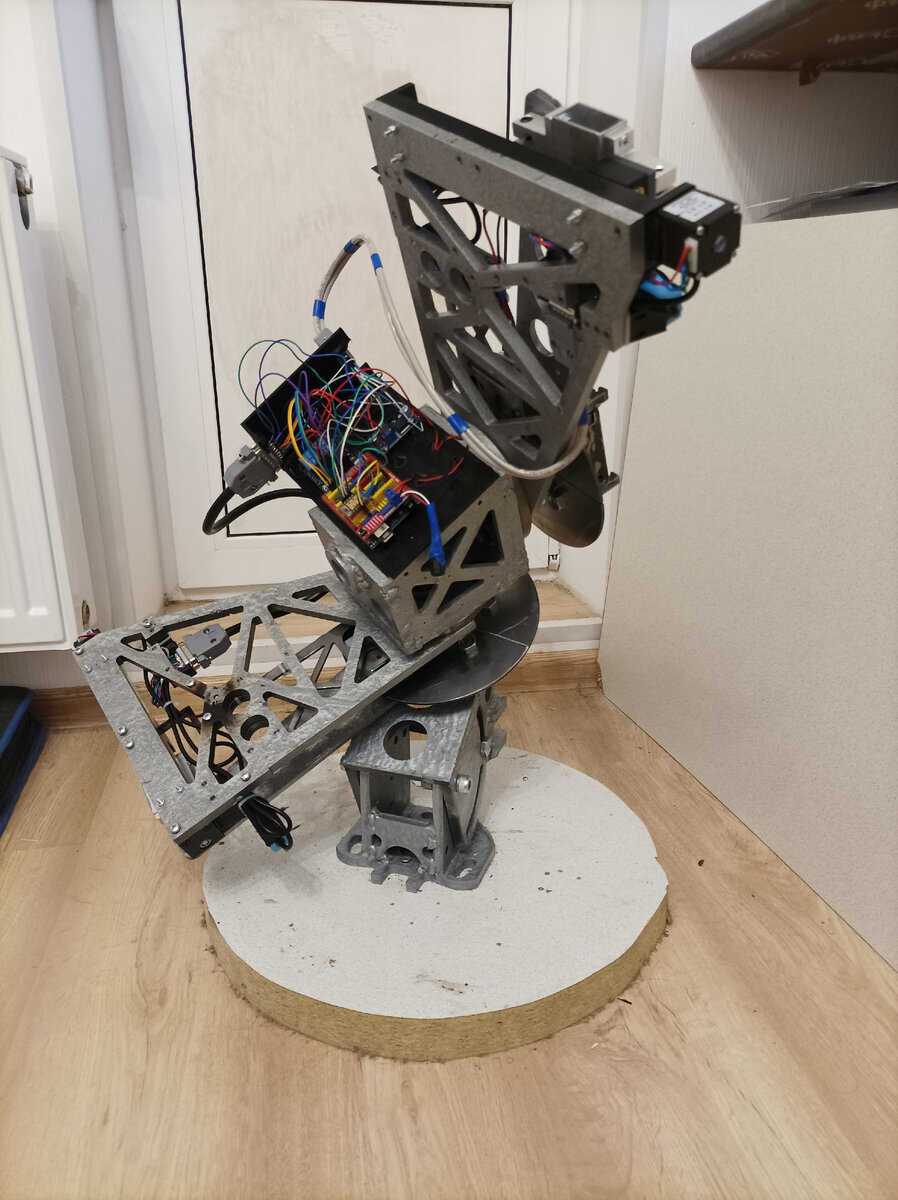
Несколько фото:
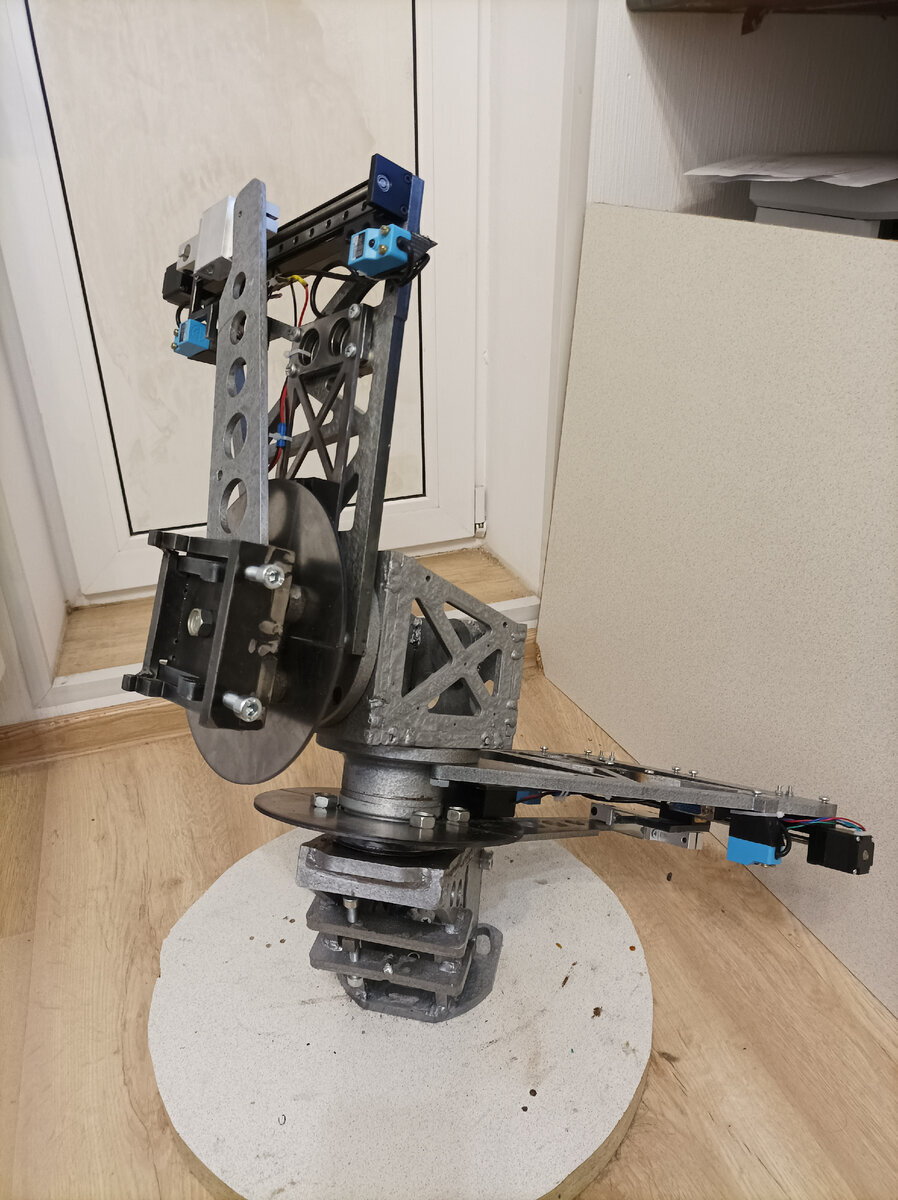
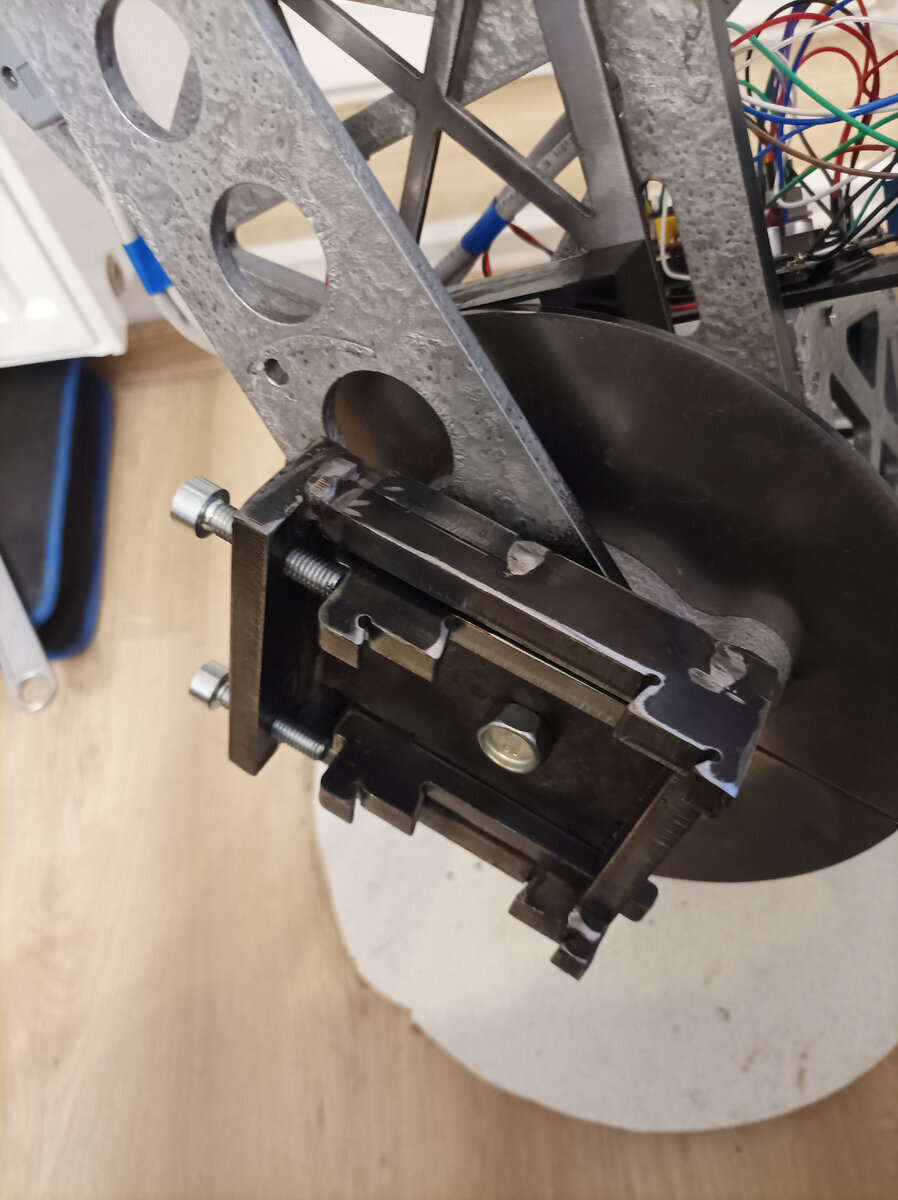
Наконец монтировка собрана в виде близком к законченному. Рама привода оси склонений установлена в положении, когда она не вызывает дисбаланса оси прямого восхождения. А привод оси прямого восхождения, установлен так как обычно направлена штанга противовесов и уравновесит небольшой телескоп до 5-7 кг, для большого можно установить штангу противовесов. Внутренний диаметр втулки (26мм) рассчитан на гантельный гриф. Вес всей конструкции 25кг (вес дырки под раковину вычтен и сюда не входит). Вращение на 360 градусов достигается за счет затормаживания оси магнитным тормозом, магнит фиксирует тормозной диск, а потом привод, прокручивая фрикцион, поворачивает рычаг на некий исходный угол, после чего тормоз отпускает и вращение телескопа продолжается. Таким образом фрикцион, в месте сочленения рычага с осью, выполняет сразу две функции: обычную функцию - предохранения привода и ручного наведения трубы и вторую - обеспечение перевода рычага в исходное положение.

Виден узел регулировки широты, рычажок, в который упираются болты, может быть повернут и зажат в нужном диапазоне широт. Этот узел рисовать было сложно, и сейчас думаю, что надо переделать, вдохновляясь AZ-EQ6.
Корпус для электроники пока до конца не нарисован. От него идут два взаимозаменяемых кабеля к двум одинаковым приводам.

Привод плашмя, виден один из подшипников тяги, два концевика.
Зажим под ласточкин хвост, как положено, для vixen и losmandy.

В сборе с 8 дюймовым ШК и противовесом 6кг.
Проверил гидирование по звездам с балкона. Гид svbony 60/240. Гид-камера qhy5 ч/б. Программа phdguide2. Подключение к монтировке через eqmod. Полярная ось выставлена на глаз. Гидирование по dec в одну сторону.
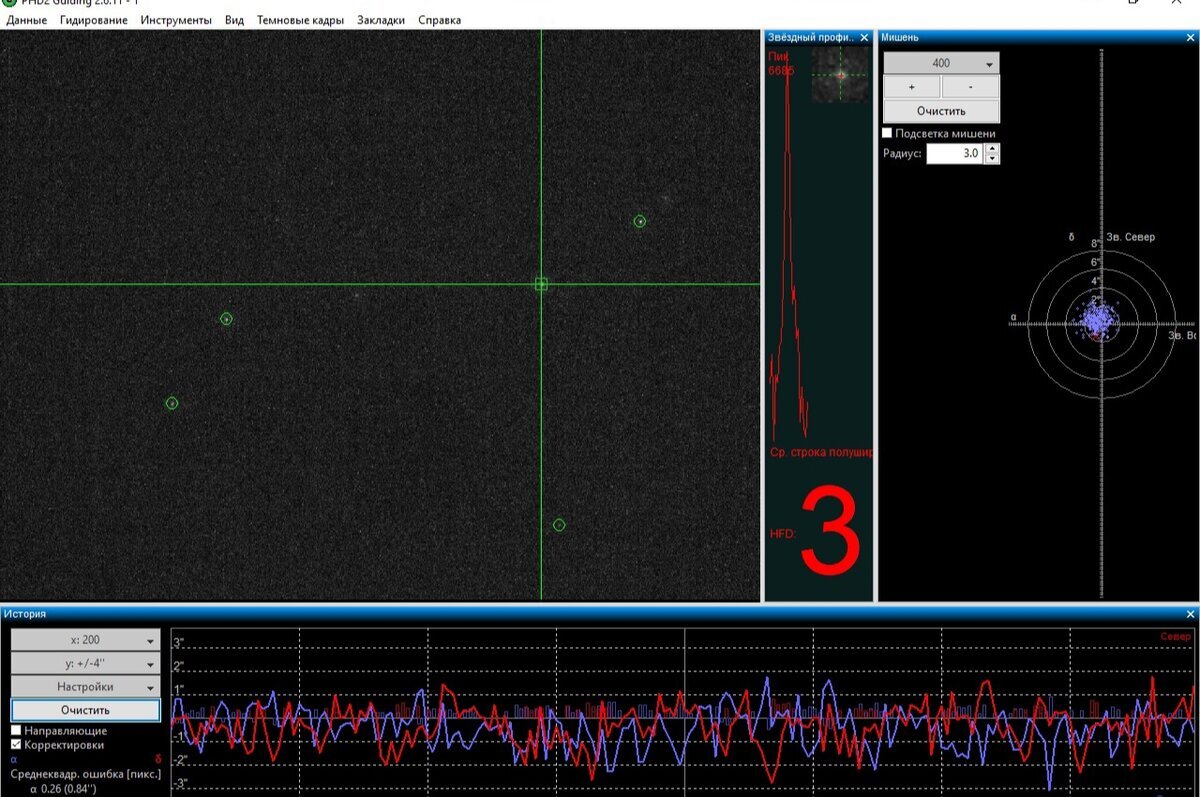
Среднеквадратические ошибки в пределах 1 угловой секунды. Большая часть отсчетов помещается в круг диаметром 2 секунды.
Несколько дней назад вечером выдалось немного ясного неба. Монтировка стояла на балконе в готовности. Записал положение изображения звезды в кадре камеры в течение 20 минут. Слежение было включено, гидирование ОТКЛЮЧЕНО.
Звезду не идентифицировал, время 23 часа, Питер, азимут 225, высота над горизонтом около 45, т.е. в пределах 30 градусов от экватора. Соотношение сигнал шум по данным phd2 130db.
Логи из PHD были открыты в Matlab и построены следующие картинки.
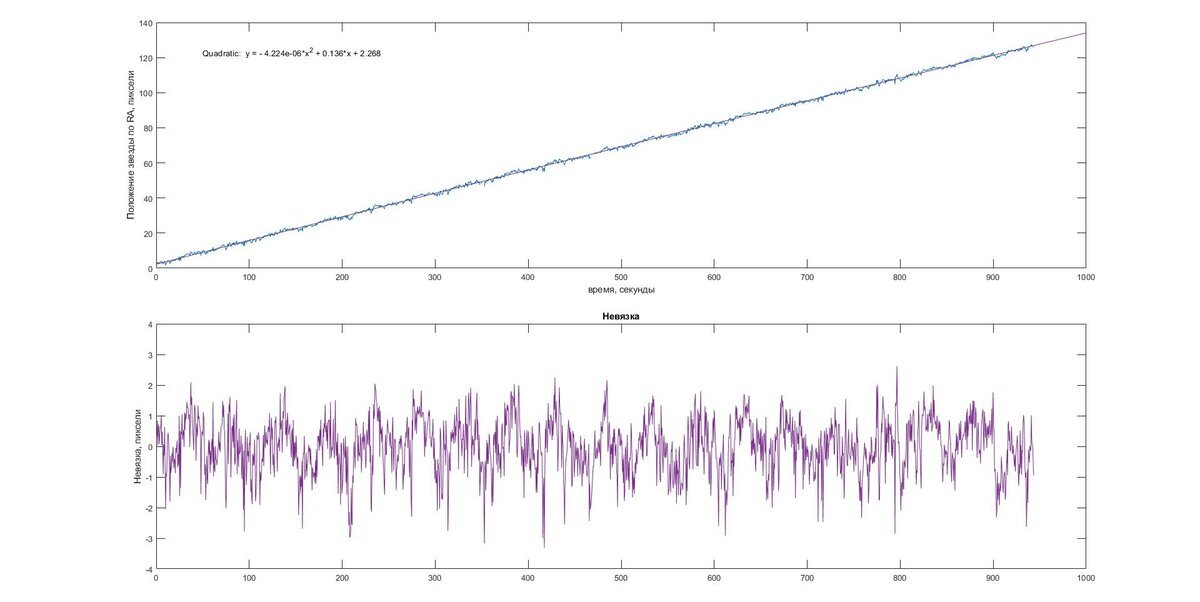
График по прямому восхождению. Вычтен квадратичный полином. Внизу показана невязка (остаток после вычитания). Просматривается периодическая ошибка с расчетным периодом - 48 секунд. Амплитуда, если игнорировать высокочастотный шум, не более 3 угловых секунд (один пиксель = 3.2 угловые секунды).
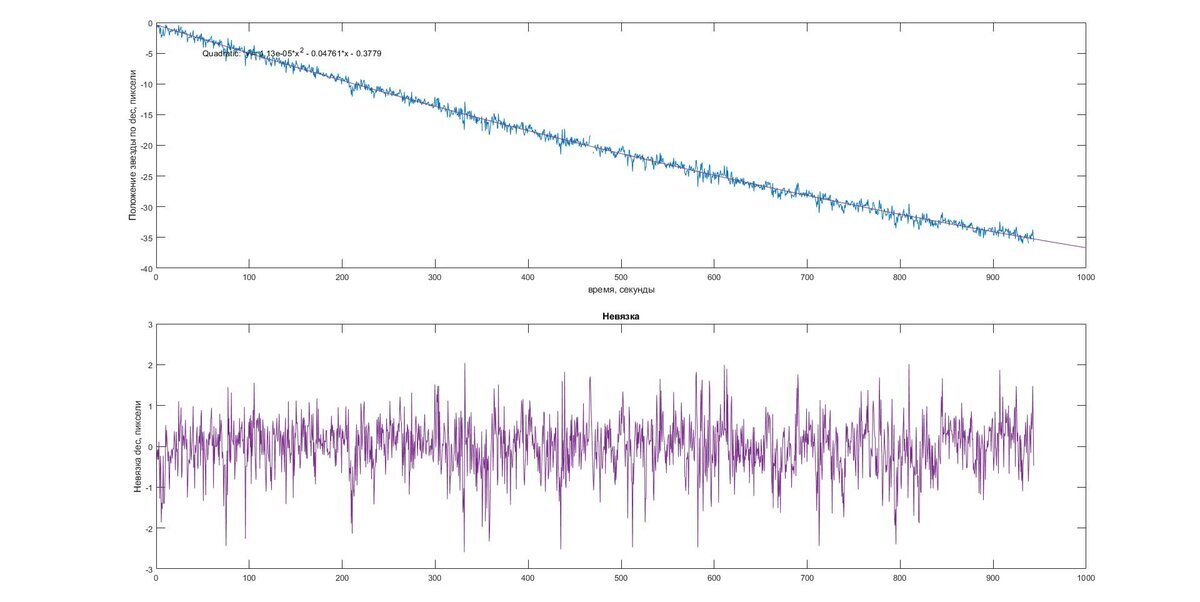
График по склонению. Также выполнена аппроксимация. Шум лежит в пределах 3 секунд. Думаю записать такой же график, с вообще отключенной монтировкой, поля зрения гида хватит на 5 минут времени. Сравнивая, можно будет отделить влияние на шум атмосферы+камеры и монтировки. И оценить её вклад. Основными факторами здесь мне кажутся вибрации и несовершенство подшипников ступицы.
Выводы следующие:
- по наблюдению звезды подтверждено, что периодическая ошибка ведения меньше 3", надо повторно записать эти графики, и дополнительно в тот же вечер записать их с неподвижной монтировки, чтобы оценить шум который вносит неспокойная атмосфера, тепло от домов, шумы камеры.
- есть смысл выдумывать оценку и учет периодической ошибки с опорой на сигналы гида, готовые средства похоже не годятся, т.к. у меня период оборота винта меняется из-за нелинейности механики.
- потенциальная грузоподъемность видится около 50кг при точной балансировке.
- GOTO отлажено. Через Starcalc и EQmod наведение работает в любую точку неба. Достижимой точностью видится 1 угловая минута. Основные источники погрешностей: небольшой сдвиг при включении тормоза, и точность калибровки нелинейности механики.
- главным преимуществом проекта вижу удовлетворение большинства нужд астрофото с достаточно тяжелой трубой при невысокой стоимости.
Остается еще много недоделок: управление по bluetooth, корпус для электроники, кожухи приводов, подкрасить местами, и вывезти наконец на дачу для полноценной проверки и получения первого фото. В перспективе оценка и учет периодики, металлическая колонна, ставить 40+кг на треногу от eq3/eq5 боязно. Пока соорудил трехгранную тумбу из OSB, получилось кстати жестко.


